Entrenador de sistema de fabricación flexible DLFMS-1601

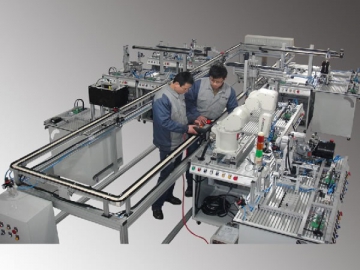





El entrenador de sistema de fabricación flexible DLFMS-1601 está dividido en 16 unidades de trabajo o estaciones de trabajo, las cuales son plataforma de control, unidad de alimentación, unidad de detección, unidad de manipulación 1, unidad de procesamiento, unidad de detección de imagen, unidad de extracción, unidad de estampado hidráulico, unidad de robot de Mitsubishi, unidad de prueba de productos terminados, unidad de almacenamiento automático, unidad de manipulación 2, unidad de embalaje de productos terminados, unidad de transporte y unidad de línea de transporte infinita.
Proyectos experimentales
1. Diseño y aplicación de PLC
a. Experimento de función de transferencia de información
b. Prueba de función decambio, conteo y tiempo
c. Experimentos de función de comparación
d. Aplicación de función de paso
e. Aplicación de función de salto
f. Aplicación de función de llamada de subrutina
g. Aplicación de función de control de interrupción
h. Aplicación de función de control de PWM
i. Aplicación de función de control de posición y velocidad de motor de pasos
j. Diseño de programa de sistema de detección
k. Diseño de programa de sistema de transmisión anular de control de frecuencia auto
ática
l. Diseño de programa de sistema de almacenamiento automático
2. Tecnología de sensor y aplicación
a. Características y aplicación del sensor fotoeléctrico
b. Características y aplicación del sensor inducido
c. Características y aplicación del sensor electromagnético
d. Características y aplicación del sensor de posición
3. Tecnología de control neumático
a. Principio de funcionamiento y aplicación de la válvula neumática controlada electrónicamente
b. Principio de funcionamiento y aplicación del generador de vacío
c. Principio de funcionamiento y aplicación de las dos partes conjuntas neumáticas
d. Principio de funcionamiento y aplicación de varios cilindros
4. Sistema de control de movimiento
a. Tecnología de control del posicionamiento del servomotor
b. Tecnología de control del motor DC
c. Tecnología de control de la frecuencia del motor AC
5. Tecnología de aplicación de robot
a. Programación de comando de acción de idioma de robot
b. Control IO externo del robot
c. Aplicaciones del manejo del robot
6. Sistema de detección visual
a. Composición y aplicación del sistema de visión de la máquina
b. Adquisición y evaluación de la imagen
7. Sistema de control hidráulico
a. Composición y aplicación de la estación de bomba hidráulica
b. Instalación del transmisor y adquisición de señal
c. Utilización del cilindro de aceite y construcción de circuitos
d. Aplicación y control de la válvula solenoide
e. Control proporcional del circuito hidráulico
f. Aplicación de HMI
g. Principio de transmisión del mecanismo de unión y rueda de cadena
8. Tecnología de interfase hombre-máquina y control de la configuración
a. Aplicación básica del software de monitoreo de configuración
b. Experimentos de aplicación de comunicaciones de software de monitoreo de configuración
9. Técnicas de entrenamiento de estructura mecánica
a. Diseño e investigación de características de la transmisión por correa
b. Diseño y características del mecanismo de transmisión por engranaje
c. Diseño y características de la varilla guía cilíndrica
d. Características y aplicación del husillo a bola
e. Diseño y características de la correa dentada
10. Entrenamiento de habilidades de detección de fallas
a. Entrenamiento de resolución de problemas de programa
b. Entrenamiento de resolución de problemas de parámetro
c. Entrenamiento de resolución de problemas de cableado eléctrico
d. Entrenamiento de resolución de problemas mecánicos
11. Tecnología de comunicación de redes y tecnología PROFIBUS
a. Principios y aplicaciones de fundación de comunicación de red
b. Investigación y aplicación de módulo PROFIBUS-DP
c. Investigación y aplicación de protocolo de comunicación PROFIBUS
d. Comunicación entre el domino PROFIBUS y las estaciones esclavas
12. Experimento de varios sensores y codificadores
a. Entrenamiento de tecnología de detección de posicionamiento de sensor fotoeléctrico
b. Entrenamiento de tecnología de detección de límite de sensor fotoeléctrico
c. Entrenamiento de tecnología de detección de límites del interruptor de límite
d. Entrenamiento de tecnología de detección del posicionamiento del interruptor de límite
Nombres relacionados
Sistema de producción mecatrónica | Sistema de entrenamiento de fabricación | Tecnología de fabricación automatizada









") Empalmador de fusión de fibra óptica PRO (con pantalla táctil LCD de 5 pulgadas)
fiberoptic-testers.com.ar
Empalmador de fusión de fibra óptica PRO (con pantalla táctil LCD de 5 pulgadas)
fiberoptic-testers.com.ar




")
")
")

")









